近来,关于自动驾驶应该重感知还是重地图是个热点话题,少数车厂、自动驾驶供应商都开始提出重感知轻地图的方案,并承诺很快能发布出对应的产品。业界也出现了高精地图已“过时”等类似的言论。一时之间,似乎轻地图已经成为了非常时髦的词汇,俨然变成自动驾驶技术实力强的代名词,高精地图图商的前景看起来变幻莫测。
无论是高级辅助驾驶地图,还是高精地图,都是不同程度的精细化地图,以下统称精细地图。而高级辅助驾驶作为自动驾驶的早期形态,以下也统称为自动驾驶。
01 重感知还是重地图?
这是个问题。但这又不是个问题,因为这两条路实际是殊途同归的一条路。本质上其实不是用不用精细地图的问题,而是如何快速更新精细地图的问题。业界批评精细地图,不外乎有两点:一、政策管控。二、成本太高,更新不快,不好用。政策上大家可见已经在逐渐松绑。而成本太高更新不快的问题,可以通过图商和车厂合作解决。在未来政策允许的前提下,最合理的路线是利用量产车的众源流量输入,实现低成本且实时快速的精细地图更新,并使用精细地图提供体验和安全性最好的自动驾驶服务。
地图,实际是一种全局范围的先验知识,是对现实世界的高度抽象,是数字孪生在地理信息方向上的主要构成。传统的标精导航地图将公开道路虚拟抽象成一条条的线。在这些抽象上,又衍生了对导航非常有用的虚拟信息,比如道路之间的拓扑连接关系、通行限制信息等等。
精细地图则是公开道路信息更丰富、精度更高的抽象和衍生。精细地图的制作过程,分成两个层次,实体抽象层和虚拟衍生层。实体抽象层可以精准地表达道路上客观存在的实体要素,例如车道线、交通灯、交通牌、交通标志等等,而虚拟衍生层则表达了对自动驾驶非常重要的要素,如车道中心线、车道虚拟边界、车道之间的拓扑连接关系、红绿灯对车道的进入退出的控制关系等。
随着自动驾驶的传感器、算力、技术的大幅提升,在相对简单的道路场景中,自动驾驶车的感知能力能逐渐很好地感知出实体要素及其位置,但虚拟要素没法被感知到。而这些虚拟要素,才是提升自动驾驶体验和安全性的关键。自动驾驶在路口对精细地图有很大依赖,路口内的虚拟车道、进入退出车道关系、连接的合理性、角度等是否符合人类司机驾驶的行为,对自动驾驶车安全通过路口至关重要。城市复杂异形路口,通行关系复杂,路口面积大,感知很难覆盖完整的路口信息,需要精细地图给出全局的先验知识。
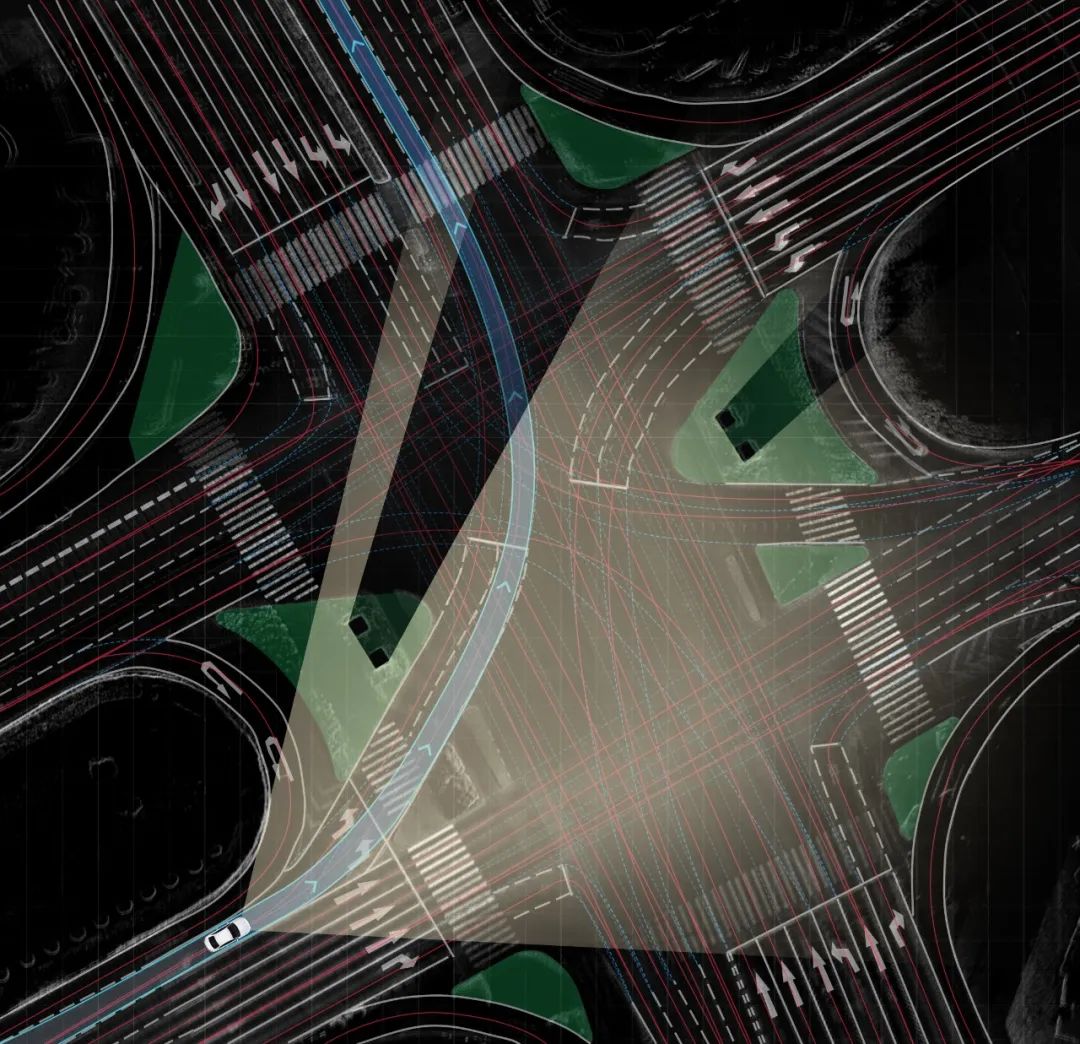 车端感知无法规避复杂路口的障碍物遮挡,只有地图可以提供完整的先验知识,保障路口的安全通行.
车端感知无法规避复杂路口的障碍物遮挡,只有地图可以提供完整的先验知识,保障路口的安全通行.
路口的红绿灯,虽然车端感知可以识别灯态,但是很难判断灯的作用车道,需要精细地图给出红绿灯控制的进入、退出车道,才能顺利通过路口。特别是很多城市都有左转待转区,或者是高架桥下面大的路口,会有多组红绿灯控制多个通行方向,没有精细地图的辅助,很难识别红绿灯和行驶路径的控制关系。路段中,各种岔路口都会有车辆的驶入驶出,有了精细地图的帮助,可以更有效准确地预测各类交通参与者对自动驾驶车辆的干扰,避免安全事故。环岛,隧道等特殊场景,自动驾驶有不同的驾驶策略,需要精细地图给出场景的范围、车道的转向类型等,触发自动驾驶不同策略的实施。公交车道、公交停靠站、潮汐车道等都需要精细地图信息辅助自动驾驶不会驶入不正确的车道。
自动驾驶是一个传感器、算力、自动驾驶技术、回传数据,与实现的自动驾驶功能体验以及安全性的平衡。传感器越多、算力越强、技术越强、回传数据越多,自动驾驶功能和体验越强。而传感器越多,能在多个传感器之间互相形成冗余,进一步提升安全性。高精地图是自动驾驶的唯一一个超距传感器,可以和感知形成冗余,提升自动驾驶的体验和安全。理论上说,传感器和算法也可以互为冗余。传感器少一些,可以部分通过算法补足。但同等算力和技术水平下,一定是有更多传感器,自动驾驶体验和安全性更好。任何一个传感器,都会有一个逐渐提升的过程,会变的对自动驾驶越来越好用。就像激光雷达,随着其价格下降,稳定性增强,现在已经变成了高端智驾车的标配。同理,低成本高质量实时更新的精细地图,一定是提升自动驾驶体验和安全的。
02 自动驾驶发展的两条路径
• 渐进式,通过不断增加传感器、算力,提升算法水平和数据回传,在量产车上从L2到L2+,逐步朝着L3、L4推进。
• 激进式,直接上L4。但到目前为止,L4迟迟不能真正量产,很多L4供应商已经转战L2+。
目前的情况是,把包括精细地图在内所有能用的传感器,足够的算力,业界最领先的技术,所有能用的都用上,能勉强做体验不错且安全的城市NOA,业界已经有成功案例。没有精细地图,就需要算法和算力层面做很大的补充,至少业界还没有人做出来。预期即便有人做出来,体验和功能也会比使用精细地图的方案要差一些。而进入L3和L4,没有精细地图可能会在可见的未来不现实。
对于技术供应商们,如果使用好的精细地图还做不出很好的自动驾驶方案,使用无精细地图方案会更难。在有图方案上深入,也许在一些相对简单场景,比如高速和城市的非路口大直路,能去除对精细地图的强依赖。但对大路口等复杂的场景,仍然非常难。无论是简单还是复杂场景,使用好的快速更新的精细地图,总能进一步提升体验和安全性。
那么,车厂有流量,是否就能替代图商呢?其实不能,因为地图是一个高度专业性的行业,制作精细地图的难度壁垒主要有以下几点:
· 高度自动化和高精度的实体抽象和测量
· 高度自动化的要素虚拟衍生
· 高级别高度自动化的全局质量保障
· 全国范围的地图量产,是对全公司技术、运营、质量控制、组织能力的严酷考验,成功做出全国量产精细地图的公司的总体能力上了一个大台阶。
实体和虚拟要素的实时快速的更新,这是精细地图的终极考验。
03 专业的人 做 专业的事
目前国内有数家图商,在数年的技术积累和大量资源投入下,在高速和城市快速路完成了全国精细地图量产。随着国家政策的逐渐松绑,城市的精细地图覆盖也会逐渐扩大。这几家图商在前面几条上都有不错的积累,但目前大家在实时更新上都还做的远不够,成本控制的也不够好。想要实现成本可控的实时快速的更新,需要有实时快速的信息源。在这一点上,量产车有天然的优势。
2022年8月30日,自然资源部发布了《自然资源部关于促进智能网联汽车发展维护测绘地理信息安全的通知》,明确智能网联汽车对车辆及周边道路设施空间坐标、影像、点云及其属性信息等测绘地理信息数据进行采集、存储、传输和处理的行为,属于测绘行为。
需要从事相关数据收集、存储、传输和处理的车企、服务商及智能驾驶软件提供商等,应依法取得相应地图资质,或委托具有相应地图资质的单位开展相应测绘活动。
感知的结果,一旦存储或回传,就需要有相应地图资质的单位管理,而图商一般都拥有对应的地图资质。车厂和图商合作,在合规的框架下,将流量回传给图商,可以让图商能低成本实时更新精细地图,而快速更新的精细地图,又可以反哺给车厂,提升自动驾驶的体验和安全性,实现双赢。让专业的人做专业的事,共同为用户体验和安全出力,是最好的社会分工方式。精细地图目前确实还不够好,但是通过图商和车厂的合作,实现了低成本实时更新,可以变得很好。无论从安全、合规还是用户体验角度,现实就是离不开精细地图,行业可以有信心。
很多人以为TESLA是走的无图方案,但实际TESLA使用了众源生成的类似精细地图。但显然,其众源生成的地图还不够好,在近期的评测中,Tesla的NOA体验已经逐渐落后于国内深度使用精细地图的高级辅助驾驶体验。一步到位众源制作精细地图也许还是太难,图商先用专业设备制作第一张底图,再通过与车厂合作获取的众源流量低成本实时更新地图,才是最可行的方法。
那么,到底是重感知还是重地图?
小孩子才做选择题,有实力的成年人当然是都要。这本质就只是个如何快速更新精细地图的问题,殊途同归的一条路,其实无需选择。感知帮助地图更新,地图反哺降低感知的压力,才是王道!
相关文章
亦朵汽车分类网址
汽车人每天打开的第一个网站